Interaktive Planung und Steuerung für den Automobilumschlag - Lösungsansatz für die Steigerung der Effizienz und Flexibilität der Logistikabwicklung auf See- und Binnenhäfen
Die Logistikleistungen von See- und Binnenhäfen stellen für die Automobillogistik einen wichtigen Bestandteil der Fahrzeugdistribution dar. Grundlegende Anforderungen an die logistische Abwicklung des Fahrzeugumschlags sind eine hohe Effizienz und Prozesssicherheit. Zudem sind eine hohe Flexibilität und Reaktivität erforderlich, um kurzfristig auf Störungen und unerwartete Änderungen reagieren zu können. Dieser Beitrag zeigt in diesem Kontext die Handlungsfelder und einen Lösungsansatz für die Gestaltung einer interaktiven Planung und Steuerung der logistischen Abwicklung auf See- und Binnenhäfen auf. Der Ansatz beinhaltet eine simulationsgestützte Planung der Logistikabwicklung sowie eine standortabhängige Prozesssteuerung und soll damit zu einer Steigerung der Effizienz und Flexibilität im Hafenumschlag beitragen.
Die Logistikleistungen deutscher Häfen spielen eine bedeutende Rolle für den Warenimport und -export. Insbesondere für die deutsche Automobilindustrie sind die Häfen als Umschlagspunkt für den Export ein wichtiger Bestandteil der Fahrzeugdistribution. Das Leistungsangebot der Hafenterminals umfasst die gesamte logistische Abwicklung, d. h. die Annahme, die Zwischenlagerung sowie die land- und wasserseitige Verladung der Fahrzeuge. Darüber hinaus werden auf den Terminals zusätzliche technische Dienstleistungen (z. B. Einbauten von Sonderausstattungen, Fahrzeugreinigung, Transportschutz) angeboten, die in die logistischen Abläufe integriert werden müssen [1].
Die logistische Abwicklung auf den Hafenterminals steht vor vielfältigen Herausforderungen. In der Automobilbranche unterliegt die gesamte Auftragsabwicklung einem hohen Kosten- und Zeitdruck [2]. Dies erfordert im Bereich des Hafenumschlags eine hohe Prozesssicherheit und -effizienz, um gegebene Lieferfristen bei gleichzeitig möglichst geringen Umschlagskosten einzuhalten. Darüber hinaus ist der Fahrzeugumschlag eng vernetzt mit vor- und nachgelagerten Partnern der automobilen Supply Chain. Eine entsprechend hohe Flexibilität ist erforderlich, um kurzfristig auf unerwartete Störungen und Änderungen der Prozessabläufe reagieren zu können. Beispiele sind zusätzliche Aufträge aufgrund kurzfristiger Händlerabrufe, Verspätungen von Transportmitteln (Schiff, Zug, Lkw) oder ungenaue Informationen über anstehende Aufträge für den Import und Export. Eine weitere Herausforderung besteht in der Bewältigung zunehmender Stückzahlen für den Import und Export. So hat sich der Fahrzeugumschlag bspw. am Standort Bremerhaven (Bild 1) allein im ersten Quartal 2017 um 13,9 % gegenüber dem Vorjahr gesteigert [3].
Die Planung und Steuerung der logistischen Abwicklung verfügt heute nicht über die erforderliche Effizienz und Flexibilität, um die beschriebenen Herausforderungen zu bewältigen. Die in den IT-Systemen hinterlegten Planungsregeln können die Komplexität des Planungsproblems nicht ausreichend berücksichtigen [4]. Dies resultiert in teilweise langen Fahrwegen und damit Effizienzverlusten. Aufgrund fehlender Echtzeitinformationen können kurzfristige Änderungen (z. B. Verspätung von Schiffen oder zusätzliche Aufträge) zudem nur verzögert durch manuelle Eingriffe in das System umgesetzt werden [5].
Der vorliegende Beitrag beschreibt in diesem Zusammenhang die Handlungsfelder und einen Lösungsansatz für die Gestaltung einer interaktiven Planung und Steuerung der Logistikabwicklung auf See- und Binnenhäfen. Durch den Einsatz von Simulation und Ortung soll die Effizienz der logistischen Abwicklung auf Hafenterminals gesteigert werden. Die Effizienzsteigerung umfasst die Verbesserung der logistischen Zielerreichung, z. B. die Reduzierung von Leerfahrten oder die Steigerung der Termintreue. Darüber hinaus soll die Flexibilität der Logistikabwicklung erhöht werden. Dies beinhaltet z. B. die Möglichkeit einer kurzfristigen simulationsbasierten Neuplanung bei Planabweichungen oder die Berücksichtigung kurzfristiger Auftragsverschiebungen bei der Auftragssteuerung.
Der Lösungsansatz basiert zudem auf einer intensiven Interaktion zwischen den Mitarbeitern und dem Planungs- und Steuerungssystem. Damit soll das vorhandene Erfahrungswissen der Mitarbeiter genutzt werden, das oftmals nicht vollständig innerhalb einer Software formalisiert werden kann. Zudem unterstützen die Interaktionsmöglichkeiten die bereichsübergreifende Zusammenarbeit bei der Planung.
Die Entwicklung des vorgestellten Lösungsansatzes erfolgt in einer Kooperation zwischen der BLG AutoTerminal Bremerhaven Gmbh & Co. KG, der 28Apps Software GmbH und dem BIBA – Bremer Institut für Produktion und Logistik GmbH. Die entwickelte Lösung soll prototypisch auf dem AutoTerminal der BLG in Bremerhaven implementiert und validiert werden.
Aufgaben und Handlungsfelder der Planung und Steuerung
Die Planung der logistischen Abwicklung im Hafenbereich umfasst die Schiffsplanung (Festlegung von Liegeplätzen, Anlegezeiten und Liegezeiten), die Gleisplanung (Darstellung der voraussichtlichen Gleisbelegung), die Flächenplanung (Flächen für die Be- und Entladung für den wasser- und landseitigen Import und Export sowie die Lagerung) und die Personaleinsatzplanung (erforderliche Mitarbeiter für Be- und Entladung sowie Fahrzeugbewegungen auf dem Terminal).
Die Planung beinhaltet eine hohe Komplexität, u. a. bedingt durch wasser- und landseitigen Transport, sowohl Import- als auch Exportprozesse sowie hohe Umschlagsleistungen. Die Planung der Prozesse und der Ressourcen erfolgt systemunterstützt, allerdings bislang auf einer heterogenen Systemplattform unter Anwendung verschiedener Planungssysteme. Die Zuweisung der Fahrzeuge zu Stellflächen auf dem Terminal erfolgt anhand fest hinterlegter Regeln und Prioritäten. Diese Regeln können nachfolgende Prozessschritte bei der Stellplatzvergabe nicht ausreichend berücksichtigen und unterscheiden z. B. nicht zwischen technischen Dienstleistungsstationen, die teilweise räumlich weit auseinander liegen [4]. Die heutige Planung führt teilweise zu langen Wegstrecken und Fahrzeiten bei der Auftragsabwicklung. Darüber hinaus ist das Planungssystem nicht in der Lage, unerwartete Zwischenfälle (z. B. Eilaufträge, Störungen technischer Dienstleistungsstationen) kurzfristig in die Planung zu integrieren. In derzeitigen Abstimmungsprozessen werden daher oftmals robuste Lösungen angestrebt, die insbesondere aufgrund der großzügigen Einplanung von Flächen und Mitarbeitern ein hohes Verbesserungspotenzial aufweisen.
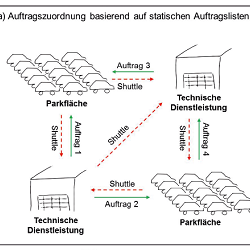
Die Steuerung beinhaltet die Auftragszuordnung, d. h. die Zuordnung von Fahrzeugbewegungen zu den Mitarbeitern und die Festlegung der Auftragsreihenfolge, in der die Fahrzeuge bewegt werden. Die Steuerung der Fahrzeugbewegungen erfolgt ebenfalls systemgestützt. Die heutigen Steuerungskonzepte basieren in der Regel auf Einwegverkehren und der Rückführung von Mitarbeiterteams durch Shuttleverkehre. Dies führt zu einer hohen Anzahl an Leerfahrten und der entsprechend geringen Produktivität der Mitarbeiter. Die Abarbeitung der anstehenden Aufträge erfolgt anhand von Auftragslisten, die den Mitarbeitern zu Schichtbeginn in Papierform ausgehändigt werden. Im Schichtverlauf notwendig werdende Anpassungen lassen sich nur mit zusätzlichem Aufwand im Arbeitsablauf berücksichtigen [5].
Zusammenfassend kann festgehalten werden, dass sowohl die Planung als auch die Steuerung hohe Verbesserungspotenziale (u. a. hinsichtlich der Fahrwege und der Ressourcenplanung) aufweisen. Darüber hinaus sind weder Planung noch Steuerung der Logistikabwicklung heute in der Lage, ausreichend flexibel auf kurzfristige Änderungen im Umfeld zu reagieren. Die Berücksichtigung dieser Änderungen erfordert ein zeitaufwendiges manuelles Eingreifen in die Prozesse und ist mit hohen administrativen Aufwänden verbunden.
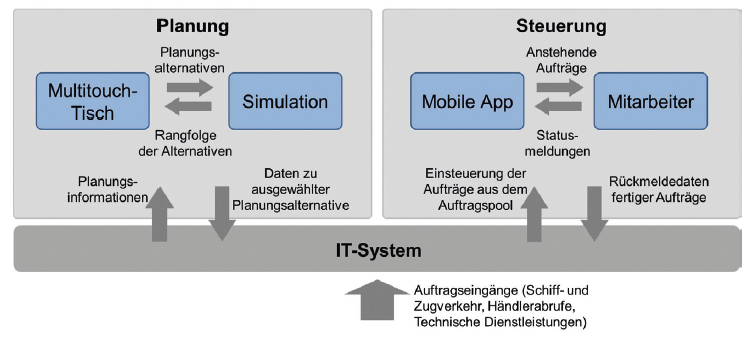
Bild 1: Lösungsansatz für eine interaktive Planung und Steuerung.
Lösungsansatz für eine interaktive Planung und Steuerung
Der nachfolgend vorgestellte Lösungsansatz (Bild 1) adressiert die dargestellten Handlungsfelder durch die Entwicklung einer interaktiven Planung und Steuerung.
Die Planung (linke Seite in Bild 1) umfasst die Zuordnung von Schiffsliegeplätzen, die Festlegung der Gleis- und Flächenbelegung sowie die Bestimmung der erforderlichen Mitarbeiterkapazitäten. Basierend auf den aktuellen Auftragseingängen sollen die erforderlichen Planungsinformationen (z. B. Schiffsankünfte oder Händlerabrufe) über eine Softwareschnittstelle an die auf dem Multitouch-Tisch installierte Software-Applikation übermittelt werden. Über diesen Multitouch-Tisch können Planungsalternativen einschließlich vorhandener Planungsrestriktionen (z. B. maximal vorhandene Mitarbeiterkapazität) definiert werden. Für die Bewertung der Planungsalternativen soll eine ereignisdiskrete Simulationssoftware eingesetzt werden. Die Simulation ermöglicht die Bewertung der Alternativen anhand eines multikriteriellen Zielsystems (z. B. Flächenbedarf, erforderlicher Mitarbeitereinsatz, Termintreue, Durchlaufzeiten). Mögliche Planungsalternativen ergeben sich unter anderem für den Fall, dass bei der Be- und Entladung von Transportmitteln unterschiedliche Stellflächen zur Auswahl stehen. Die Planung muss bspw. ankommenden Schiffen einen eindeutigen Liegeplatz zuweisen. Die Wahl des Liegeplatzes führt zu unterschiedlich langen Fahrwegen und beeinflusst damit den Mitarbeiter- und Zeitbedarf für die Be- und Entladung. Die Leistungsunterschiede der einzelnen Alternativen können simulationsbasiert bewertet werden. Basierend darauf können die Alternativen in eine Rangfolge gebracht werden, die dem Mitarbeiter als Entscheidungshilfe bei der Auswahl einer der vorgeschlagenen Alternativen dient.
Die simulationsbasierte Planung soll eine verbesserte Nutzung der erforderlichen Ressourcen (z. B. Flächenbelegung, Mitarbeiterkapazitäten) und gleichzeitig eine hohe Planungssicherheit ermöglichen. Anstelle einer rein intuitiven Planung ermöglicht die Simulation eine umfassende Bewertung verschiedener Planungsalternativen. Diese ist in der Lage, neben logistischen Zielgrößen (z. B. Termintreue oder Kapazitätsauslastung) auch weitere Kenngrößen, bspw. die Robustheit der Planungsszenarien gegenüber auftretenden Planänderungen, zu berücksichtigen. Damit unterstützt die Simulation die Mitarbeiter dabei, die für die jeweilige Situation am besten geeignete Planungsalternative auszuwählen. Die simulationsgestützte Planung soll zudem bei auftretenden Änderungsbedarfen (z. B. aufgrund von Verspätungen) eingesetzt werden, um notwendige Umplanungen zu beurteilen und damit eine reaktionsschnelle Anpassung der Planung zu ermöglichen.
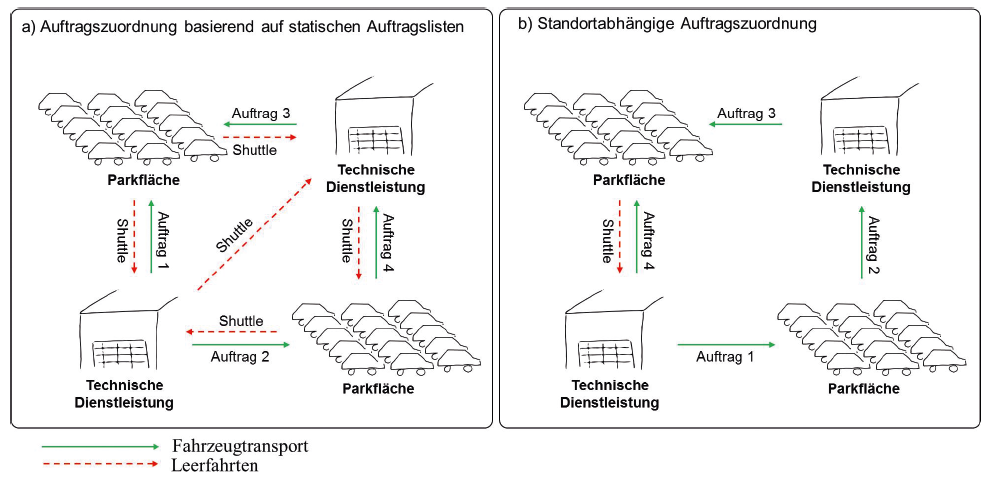
Bild 2: Statische vs. standortabhängige Auftragszuordnung (in Anlehnung an [6]) .
Um zukünftig auf kurzfristige Änderungen reagieren zu können, ist im Rahmen des Lösungsansatzes auch die Entwicklung einer dynamischen und interaktiven Steuerung der Fahrzeugbewegungen vorgesehen. Anstelle der Nutzung statischer Auftragslisten soll die Steuerung der Fahrzeugbewegungen zukünftig neben den Auftragsdaten (z. B. Liefertermine) auch den Standort der Fahrzeuge berücksichtigen. Die dynamische Steuerung basiert auf von mobilen Endgeräten und Auto- ID erzeugten Echtzeitstatusmeldungen und der Lokalisierung von Shuttle-Bussen und Fahrzeugen. Das primäre Ziel des Steuerungsalgorithmus ist eine intelligente Auftragszuordnung, die den Mitarbeitern nach jedem fertiggestellten Fahrauftrag eine direkte Bearbeitung von Folgeaufträgen ermöglicht und so die Leerfahrten reduziert (Bild 2). In der Praxis kann jedoch nicht gewährleistet werden, dass den Mitarbeitern an jedem Standort ein Folgeauftrag zur Verfügung steht. In diesem Fall sind weiterhin Shuttle-Verkehre erforderlich, die im Gegensatz zu heute bedarfsorientiert mit einer flexiblen Routenführung eingesetzt werden sollen. Dadurch besteht bei der Entwicklung die Herausforderung, dass die Steuerung neben einer Optimierung der Fahrwege für die Mitarbeiter bereits bei der Auftragszuordnung auch die Optimierung der Shuttle-Verkehre berücksichtigen muss. Der Steuerungsalgorithmus verfolgt damit neben der Reduzierung der Leerfahrten auch die Zielsetzung, die benötigten Shuttle-Fahrzeuge auf dem Terminal zu reduzieren und eine möglichst hohe Auslastung der Shuttle-Fahrzeuge zu gewährleisten.
Der Steuerungsalgorithmus wird mittels einer mobilen App umgesetzt. Die Nutzung dieser App soll es den Mitarbeitern ermöglichen, in Abhängigkeit ihres Standorts die jeweils priorisierten Aufträge abzuarbeiten und gleichzeitig Änderungen im operativen Ablauf in der Form von Statusmeldungen zeitnah an das Steuerungssystem zu übermitteln (rechte Seite in Bild 1).
Die zur Realisierung einer interaktiven Logistikabwicklung notwendigen Informationen erfordern den Einsatz eines Ortungssystems, um z. B. den Standort von Fahrzeugen in Echtzeit zu erfassen und bei der Steuerung zu berücksichtigen. Eine Herausforderung ist die erforderliche Ortungsgenauigkeit, die eine exakte Lokalisierung der Fahrzeuge bis hin zum Stellplatz ermöglichen muss. Aus diesem Grund werden für die Umsetzung des Konzepts die Potenziale verschiedener Ortungsmethoden, wie Differential-GPS (DGPS) oder einer WLAN-Fingerprintortung untersucht. Diese Untersuchung ist erforderlich, da sich in der Vergangenheit gezeigt hat, dass eine GPS-basierte Ortung für den Automobilumschlag zu ungenau ist und am Markt verfügbare proprietäre aktive Ortungssysteme nicht wirtschaftlich eingesetzt werden können. Zudem liegt ein besonderes Augenmerk auf der Untersuchung von Möglichkeiten zur Fahrzeugverfolgung in Parkregalen, da in diesem Bereich, bedingt durch die metallische Struktur der Parkregale, eine GPS-basierte Ortung nicht möglich ist. So ist zu untersuchen, welche Sensoren gepaart mit weiteren technischen Systemen sowie prozessualen Anpassungen erforderlich wären, um Fahrzeuge in Parkregalen jeweils eindeutig einem Stellplatz zuzuweisen.
Insgesamt zielt das Konzept der interaktiven Planung und Steuerung auf eine intensive Kommunikation und Interaktion zwischen den Mitarbeitern und dem Planungs- und Steuerungssystem ab. Die Unterstützung dieser Kommunikationsmöglichkeiten erfordert im Rahmen der Entwicklung die Berücksichtigung einer anwenderfreundlichen und aufwandsarmen Bedienerführung. Dies beinhaltet z. B. auf Seiten der Planung eine übersichtliche Visualisierung des Terminallayouts, der vorhandenen Ressourcen und der einzuplanenden Aufträge. Zudem muss der Multitouch-Tisch die Möglichkeit bieten, die Simulationsergebnisse mehrerer Planungsalternativen übersichtlich anhand definierter Zielgrößen zu vergleichen sowie Planungsalternativen auszuwählen und gegebenenfalls anzupassen.
Zusammenfassung und Ausblick
Der vorliegende Beitrag beschreibt einen Lösungsansatz für die Entwicklung einer interaktiven Planung und Steuerung der logistischen Abwicklung auf See- und Binnenhäfen. Der Ansatz basiert auf einer intensiven Interaktion zwischen dem Planungs- und Steuerungssystem und den Mitarbeitern. Bei der Planung ermöglichen der Einsatz eines Multitouch-Tischs und die simulationsbasierte Bewertung von Planungsalternativen den Mitarbeitern eine fundierte und systematische Auswahl geeigneter Planungsalternativen. Die standortabhängige Steuerung der Fahrzeugbewegungen und der Einsatz einer mobilen App unterstützen eine Reduzierung von Leerfahrten und die Möglichkeit, kurzfristige Änderungen reaktionsschnell in den Arbeitsablauf zu integrieren. Zusammenfassend verfügt das vorgestellte Planungs- und Steuerungssystem damit über das Potenzial einer erheblichen Steigerung der Effizienz und Flexibilität der logistischen Prozesse auf See- und Binnenhäfen.
Die entwickelte Lösung soll prototypisch auf dem AutoTerminal der BLG in Bremerhaven implementiert und validiert werden. Das Auto- Terminal in Bremerhaven umfasst eine Fläche von 2.400.000 m² mit ca. 95.000 Parkplätzen, 18 Schiffsliegeplätze, 16 Bahnrampen und vier Lkw-Dispositionsflächen. Darüber hinaus werden eine Vielzahl von technischen Dienstleistungen für Import- und Exportfahrzeuge angeboten. Aufgrund seiner Größe und der Vielzahl an angebotenen Dienstleistungen beinhaltet die logistische Abwicklung auf dem Terminal eine hohe Planungskomplexität. Damit stellt das Autoterminal einen idealen Anwendungsfall für die Validierung des Planungs- und Steuerungssystems dar und sichert damit eine einfache Übertragbarkeit der angestrebten Lösung auf andere Häfen oder Autoterminals mit einer geringeren Komplexität.
Dieser Beitrag entstand im Rahmen des vom Bundesministerium für Verkehr und digitale Infrastruktur (BMVI) unter dem Förderkennzeichen 19H17003 geförderten Projekts „Isabella – Automobillogistik im See- und Binnenhafen: Interaktive und simulationsgestützte Betriebsplanung, dynamische und kontextbasierte Steuerung der Gerät- und Ladungsbewegungen“.
Schlüsselwörter:
See- und Binnenhäfen, interaktive Planung und Steuerung, simulationsbasierte PlanungLiteratur:
[1] Böse, F.; Piotrowski, J.; Scholz-Reiter, B.: Autonomously controlled storage management in vehicle logistics - applications of RFID and mobile computing systems. In: International Journal of RF Technologies: Research and Applications 1 (2009) 1, S. 57- 76.
[2] Klug, F.: Logistikmanagement in der Automobilindustrie: Grundlagen der Logistik im Automobilbau. Berlin Heidelberg 2010.
[3] DVV Media Group GmbH: Bremische Häfen: Weniger Container, mehr Fahrzeuge. URL: http://www.dvz.de/rubriken/ seefracht/single-view/nachricht/ bremische-haefen-weniger- container-mehr-fahrzeuge. html, Abrufdatum 17.07.2017.
[4] Böse, F.; Piotrowski, J.; Windt, K.: Selbststeuerung in der Automobil- Logistik. In: Industrie Management 21 (2005) 4, S. 37-40.
[5] Werthmann, D.; Brandwein, D.; Ruthenbeck, C.; Scholz-Reiter, B.; Freitag, M.: Towards a standardised information exchange within finished vehicle logistics based on RFID and EPCIS. In: International Journal of Production Research 55 (2017) 14, S. 4136- 4152.
[6] Hoff-Hoffmeyer-Zlotnik, M.; Schukraft, S.; Werthmann, D.; Oelker, S.; Freitag, M.: Interactive Planning and Control for Finished Vehicle Logistics. In: HICL – Logistics and SCM meet Digitalization. 2017.